Johnny EV3
Ci którzy mnie już trochę znają, to wiedzą, że moim ulubionym robotem filmowym, jest „Numer pięć” („Johnny five”) z filmów „Krótkie spięcie”.
Sam się już zgubiłem w liczeniu: ile jego wersji zbudowałem.:-)
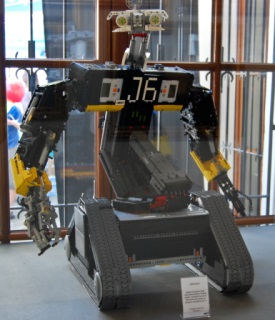
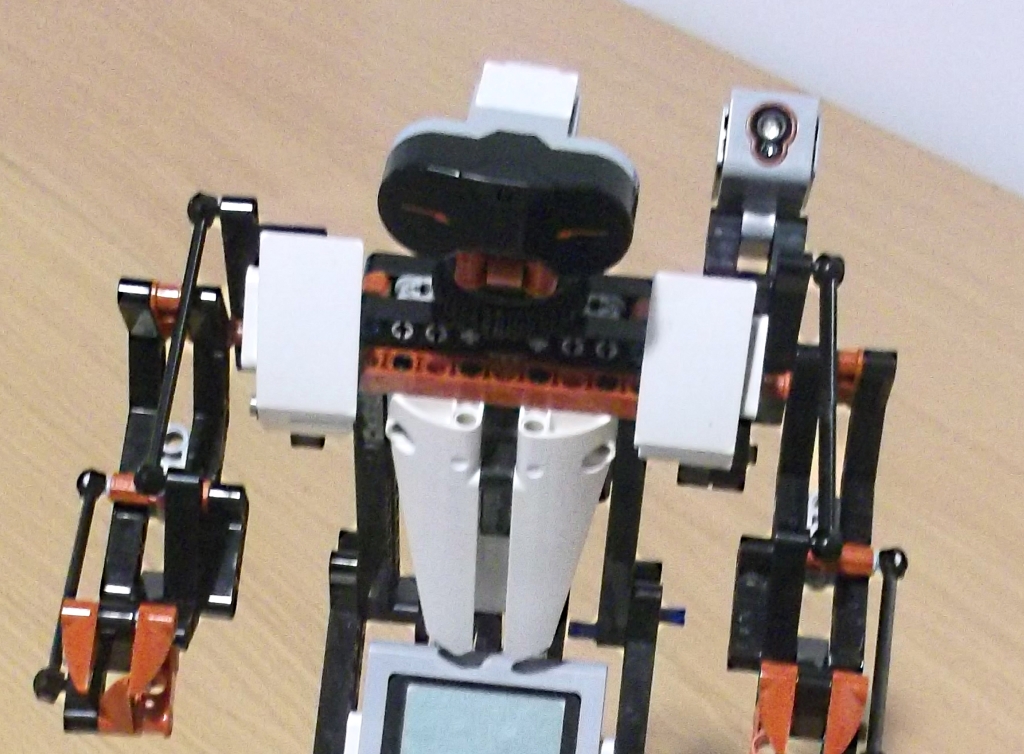
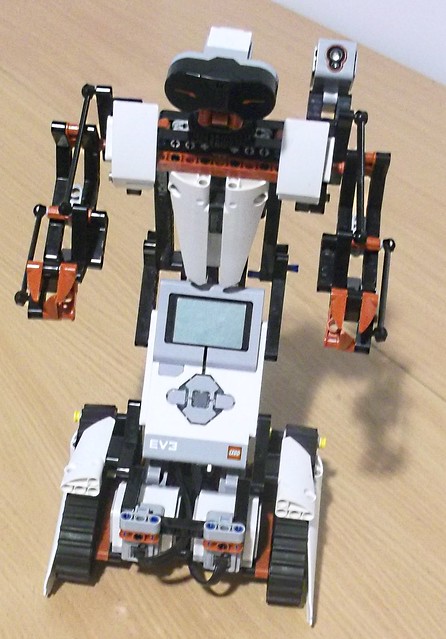
Poniżej model, zbudowany jako modyfikacja zestawu 31313 (prawie).

Model jaki jest – każdy widzi. 🙂 Jeśli ktoś nie zna oryginału, to polecam film, albo przynajmniej zdjęcie :

Model powstał (prawie) wyłącznie z klocków dostępnych w zestawie 31313. Jedyna rzecz pochodząca spoza tego zestawu to … kabelek. kabelki do połączenia funkcjo z kostką mają różną długość. I brakło mi długości kabelka do silnika w tułowiu – wymieniłem go na dłuższy, pochodzący z innego zestawu. Jednakże, gdyby ktoś chciał zbudować takiego Johnny’ego z pojedynczego zestawu 31313, to i tak się da – wystarczy zamontować kostkę „do góry nogami” – wtedy długości kabelków pasują, ale trochę traci się na estetyce’ 🙂
Funkcjonalność w związku z ograniczeniami, wynikającymi z użycia tylko klocków z jednego zestawu jest dość mała.
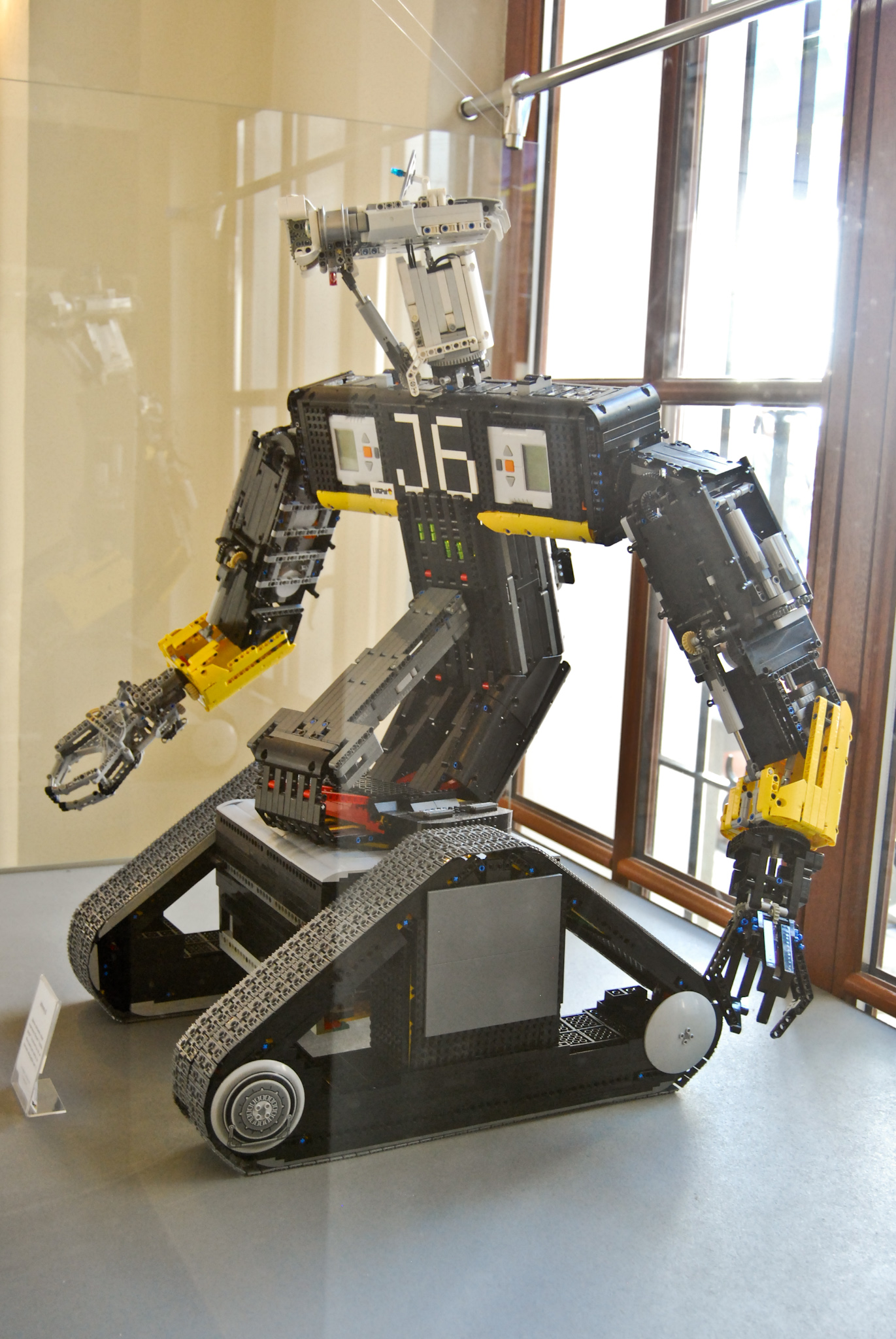
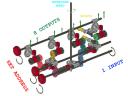
Dwa silniki służą do poruszania się. Każdy niezależnie może sterować pojedynczą gąsienicą, więc robot może jechać po prostej lub skręcać.
Trzeci silnik służy do „machania rękami” i kręcenia głową. Funkcje te są połączone ze sobą, Czyli mamy jednocześnie jedno i drugie. Ręcę są połączone cięgnami, więc przy podnoszeniu rąk w ramionach, jednocześnie rusza się też łokieć oraz otwierają/zamykają się „palce”.
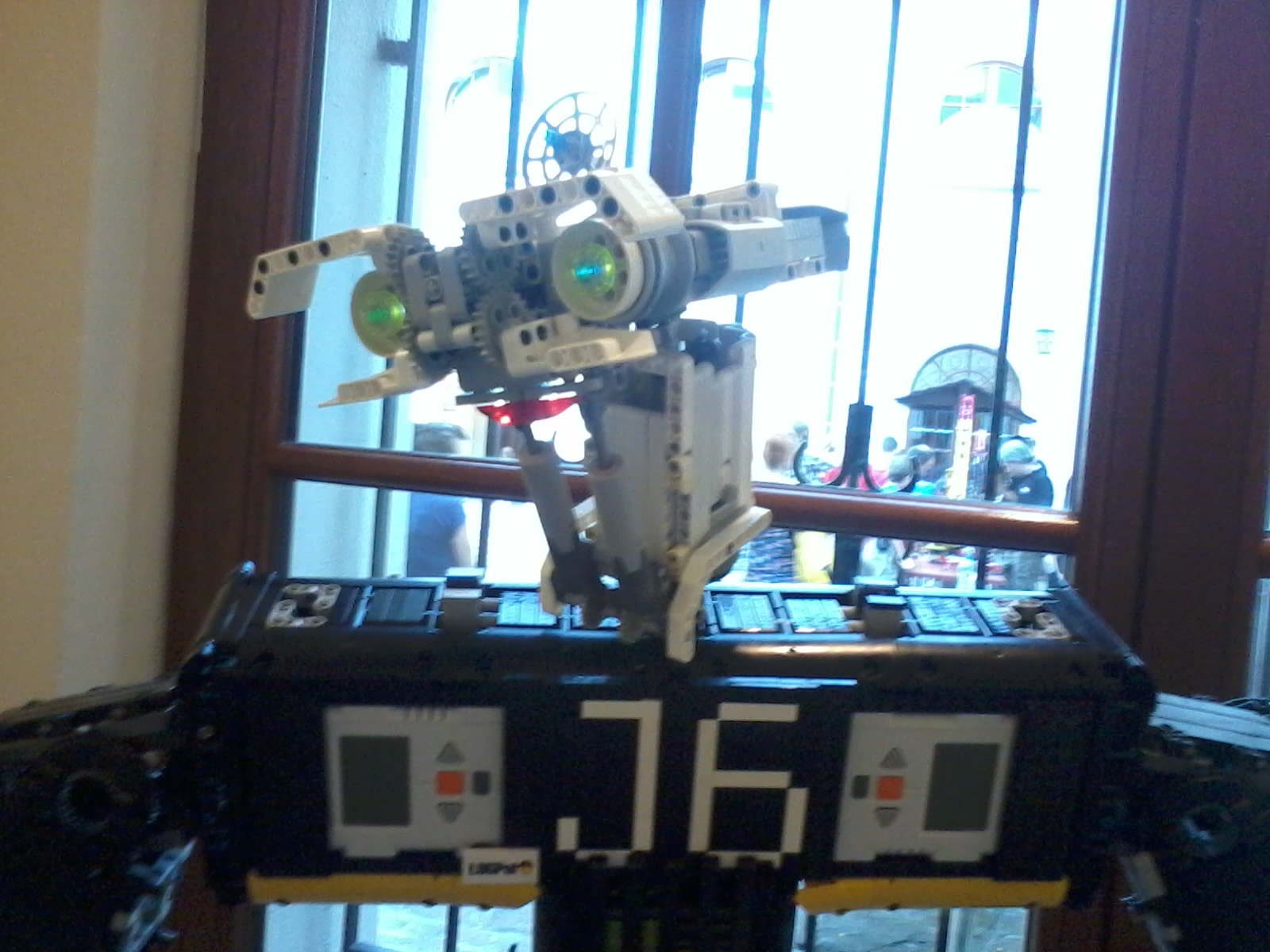
Jedyny podłączony czujnik jest w „oczach”. Przy zbliżeniu jakiegoś przedmiotu do oczu (np. przy próbie uderzenia”, robot się cofa, podnosi ręce, kręci głową, krzyczy, że jest żywy „I am a life”, po czym powraca wszystkim do stanu poprzedniego (opuszcza ręce, odkręca głowę i podjeżdża s powrotem na miejsce w którym stał). Nie ma tu jakiejś większej filozofii, a program składa się z kilku raptem bloków.

Czujnik na ramieniu ma „udawać laser”, ale jego już nie podpinałem (znowu byłby problem z długością kabelka). Nie jest również napędzane niczym jego podnoszenie, lub chowanie – można tylko „ręcznie”. 🙂
Krótki filmik z funkcjami w działaniu: