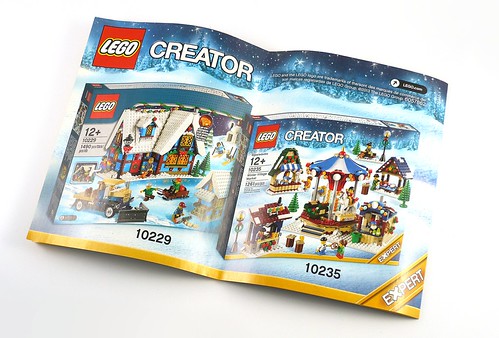
10235 Winter Village Market
Poczynając od 2009 roku TLG rok rocznie dostarcza nam przed świętami przyzwoitych rozmiarów zestaw, pozwalający na stworzenie prawdziwej Zimowej Wioski, oczywiście niepozbawionej wyraźnych świątecznych akcentów. Dotychczas otrzymaliśmy sklep z zabawkami, piekarnię, pocztę i wiejską chatę. Do tego sporo dodatków, pojazdów, mnóstwo akcesoriów. W tym roku naszą wioskę możemy uzupełnić o kolorowy jarmark.
LEGO, Creator, Expert / Seasonal, Winter Village
10235 Winter Village Market


Seria: Creator, Expert / Seasonal, Winter Village
Rok premiery: 2013
Liczba elementów: 1261
Figurki: 9
Wymiary pudełka: (w przybliżeniu) 47.5 x 37 x 6 cm
Cena: $99.99, £79.99, 89,99 €, 399,99 zł, monopolistyczny serwis aukcyjny: od 450 zł z przesyłką, czyli znacznie drożej niż na S@H!
Oficjalny filmik:
[youtube=http://www.youtube.com/watch?v=KVnqxgxiwQw]
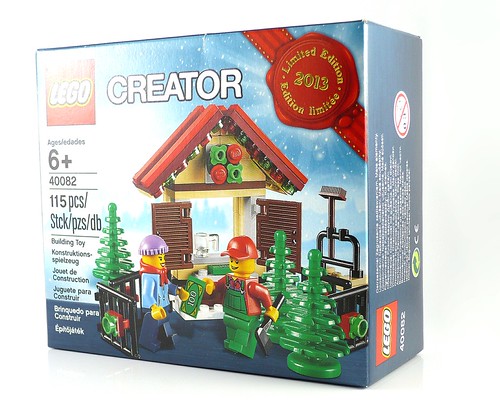
Pudełko zachwyca. Sporych rozmiarów gruby karton zdobi zdjęcie prezentujące cały zestaw w pełnej krasie, umieszczone na idealnie dobranym, nastrojowym tle. Napis „Creator” w ogóle nie przeszkadza, czego już nie można powiedzieć o strasznie kiczowatym oznaczeniu „Expert”.
Na tyle pudełka ukazano zbliżenia na wybrane składowe zestawu, białe delikatne strzałki dodatkowo podkreślają aspekt bawialności.
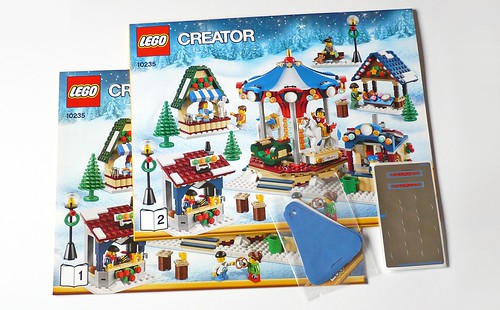
Na zawartość pudła składa się w sumie osiem woreczków oznaczonych cyframi 1 i 2, dwie białe płytki wrzucone luzem,


oraz dwie instrukcje, wraz z arkuszem naklejek i elementami materiałowymi zabezpieczone dodatkowym kartonikiem. Patent z zabezpieczeniem jest już od dłuższego czasu dobrze znany, i sprawdza się wyśmienicie, szkoda jedynie, że został zarezerwowany tylko dla większych zestawów.

Naklejki to srebrny błyszczący arkusik na którym znalazło się dziewięć kółek i dwa paski z ornamentami – wszystkie te elementy posłużą do dekoracji karuzeli.

Elementy materiałowe dostępne w dwóch kolorach także wpłyną na wygląd karuzeli.

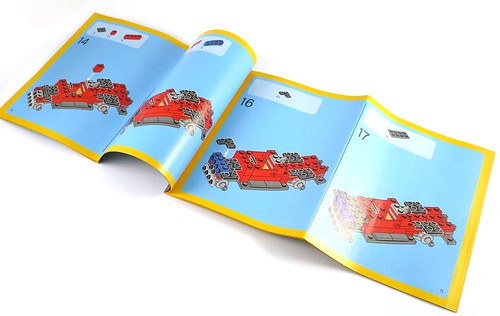
Instrukcje to dwie książeczki w formacie zbliżonym do A4, pierwsza liczy 40 stron i zawiera plany budowy straganów, druga na 76 stronach pokazuje jak złożyć karuzelę. To co mnie od dawna zastanawia, to zastosowanie różnego papieru na poszczególne okładki, przez co wyraźnie widać jakość odwzorowania zdjęcia zestawu w druku: na lepszym papierze zdjęcie jest zauważalnie lepszej jakości, a kolory są wyraźnie bardziej nasycone.




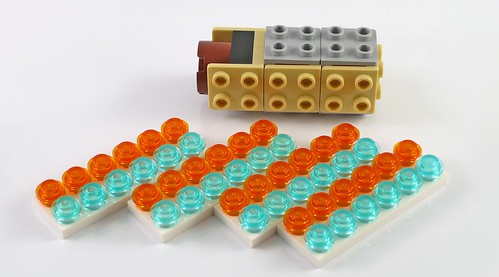
Jak każdy zestaw świąteczny także i ten dostarcza mnóstwa ciekawych elementów, w tym płytek w przepięknych „ciemnych” odcieniach (Dark Blue, Dark Red, Dark Red, Dark Tan),

dwóch sporych garści drobnicy,


oraz przyzwoitej liczby akcesoriów, w tym precla, ciasto, kotka, lizaków (okrągłe Tile 1×1 z premierowym spiralnym nadrukiem!) a także uroczego miśka który debiutował w szóstej serii Collectible Minifigures.

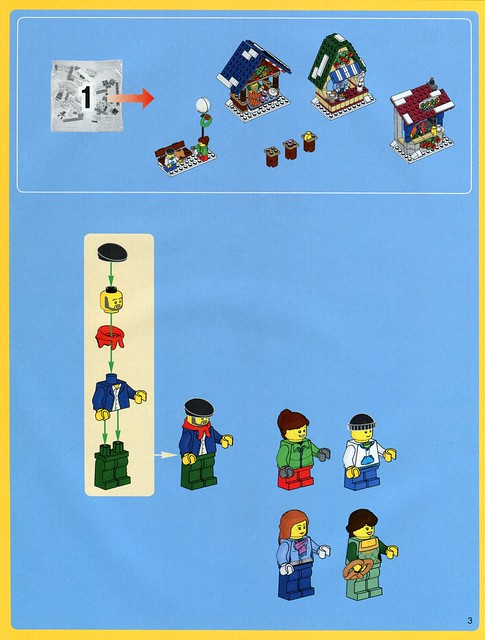
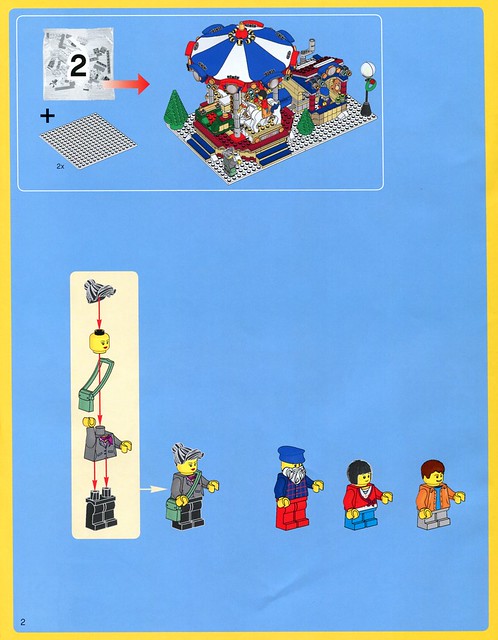
Niedawno, przy okazji recenzji małych promocyjnych zestawów świątecznych z tego roku (40082 Christmas Tree Stand & 40083 Christmas Tree Truck), rozpływałem się nad urokiem figurek pochodzących z tychże zestawów. Także tutaj nie należy szczędzić głosów zachwytu: niniejszy zestaw dostarcza aż 9 figurek, a wszystkie naprawdę są bardzo udane! Wśród „dorosłych” znajdziemy dwóch mężczyzn i aż trzy kobiety, przy okazji warto podkreślić, że tors ze szaliczkiem występuje tylko i wyłącznie w zestawach świątecznych!


Czwórka dzieciaków: dwóch chłopców i dwie dziewczynki, świetnie pasuje do tematyki zestawu i podkreśla rodzinny aspekt świąt. Do tego na licach wszystkich figurek królują uśmiechy, jaka to odmiana po wiecznie skrzywionych postaciach z serii licencyjnych.


Tylko dwie figurki mają podwójny nadruk na buźkach, no i już w tym przypadku wersje alternatywne do zadowolonych nie należą. Nie wiem czy warto wspominać, ale zauważcie, że obie te figurki są płci żeńskiej…

Czas na budowę! Z elementów pochodzących z woreczków oznaczonych cyfrą jeden składamy kolejno:
– trzy maciupkie stoliki,

– ławeczkę, na której zadomowił się kocur, oraz bardzo ładną stylową latarnię,

– stoisko z grillem, podczas zimnego dnia warto przegryźć udko czy kiełbaskę na ciepło,


– stoisko ze świątecznymi wypiekami,

– a dla milusińskich budka z łakociami.

Trzy budki oferują nie tylko różny asortyment, ale też każdą składa się zupełnie inaczej, do tego każda utrzymana jest w innej kolorystyce i posiada inne ozdobniki nawiązujące do okresu świątecznego. Wszystkie prezentują się nader udanie, są zgrabne, ładne, mimo małych rozmiarów, przyzwoicie bogate w ozdobniki i akcesoria. Ławeczka z lampą jest miłym urozmaiceniem, a na trzy proste stoliki zawsze koło stoisk znajdzie się miejsce.
Czas zabrać się zabudowę karuzeli!
Początek zapowiada, że także wyznawcy wielkiej zębatki znajdą tutaj coś dla siebie.
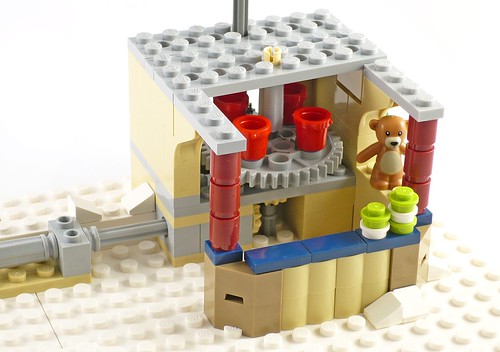
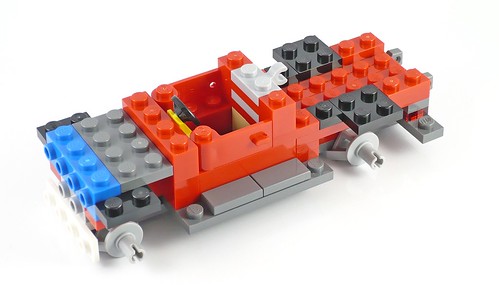
Powstaje budka skrywająca mechanizm sterujący, a dodatkowo wykorzystująca go jako obrotową platformę (koło zębate „Gear 40 Tooth„) na której nasze minifigi mogą trenować celność.

Niestety, było późno i musiałem najwidoczniej coś źle złożyć, gdyż w mojej budce pojawiła się niepokojąca szpara (nazwa zastrzeżona!). Rozłożyłem więc konstrukcję i spróbowałem ponownie.
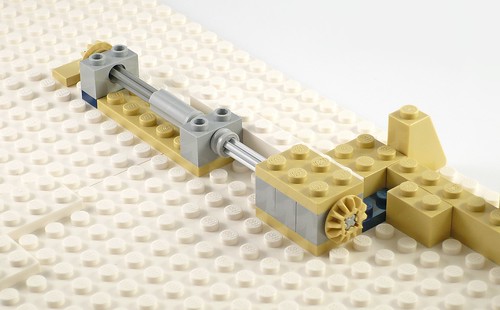
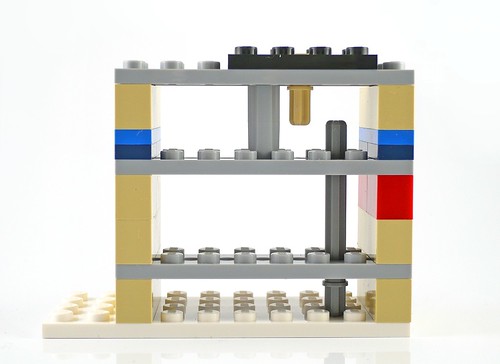
Albo coś mocno pokićkałem, albo rzeczywiście coś tutaj nie gra. Po takim teście:

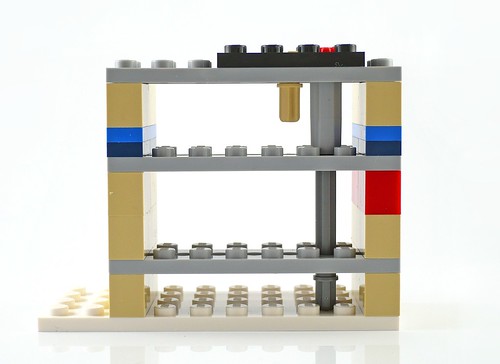
okazuje się, że połączenie Axle 5.5 with Stop + Axle Connector + Axle Pin without Friction Ridges Lengthwise jest z deka większe niż 5 cegiełek i jedna płytka! Fizycznie nie ma możliwości, żeby to się zgrało, co obrazuje wyraźnie poniższe zdjęcie.
Na szczęście już podczas budowy błąd projektantki można łatwo naprawić zamieniając Axle Pin without Friction Ridges Lengthwise na np.: Axle 2 Notched (element ten występuje w zestawie, niestety nie ma żadnego zapasowego, tak więc trzeba go skołować we własnym zakresie).
Muszę przyznać, że aż taki błąd konstrukcyjny bardzo mnie zaskoczył, sądziłem, że coś takiego nie ma szans pojawić się w oficjalnym zestawie – przecież od razu widać, że coś tutaj nie gra! Może w pierwotnym zamyśle miały być tutaj wykorzystany inny zestaw elementów, a błąd powstał podczas składania listy elementów?
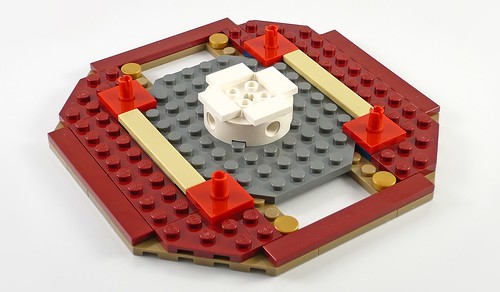
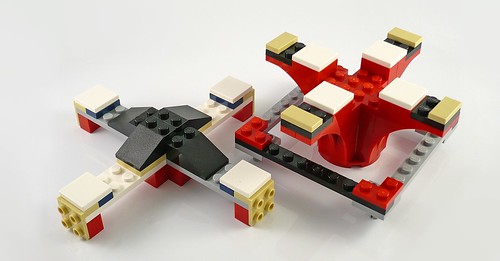
Mając nadzieję, że dalej nie natknę się na podobne kwiatki, przystąpiłem do dalszego składania. Dokończyłem budkę, powstała podstawa pod obrotowy element karuzeli,

która szybko została wygładzona, a dodatkowo pojawiły się tutaj zielone łuki – jak się zaraz okaże, wykorzystane do naprawdę genialnego patentu!

Kolejne elementy karuzeli buduje się modułowo, składanie jest bardzo przyjemne,
choć przy dwóch zestawach po osiem ozdobników wkrada się mała monotonia, na szczęście dosłownie tylko na chwilę.

Na karuzeli pojawią się dwa… no właśnie, co to jest? Statki kosmiczne? Autka? Zabudowane wózki sklepowe? Ani to ładne, ani niestety ciekawe…
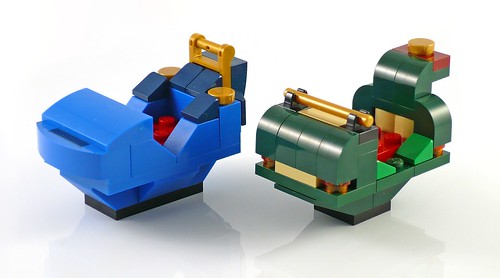
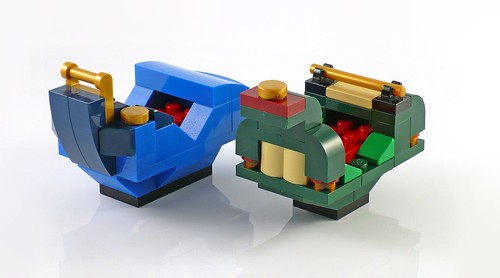
Rewelacyjnie natomiast prezentują się konie, wzór obecnie już nienowy, ale kunsztowne ozdobniki można bez wątpienia nazwać małymi dziełami sztuki!

Konie zostaną przyczepione do odpowiednio przygotowanych podstawek, które zamontowane w podstawie karuzeli spowodują, że kręcąc korbą nie tylko wprawiamy całą konstrukcję w ruch obrotowy, ale nasze konie dodatkowo wierzgają! Wprost genialne i sprawdza się wyśmienicie!




Jarmark w moim mniemaniu sprawdził się prawie perfekcyjnie, idealnie wpasowuje się klimatem w Zimową Wioskę, całość prezentuje się bardzo ładnie, kolorowo, jest bawialna.

Niestety, nie obyło się bez paru wpadek, z których największa to dziwaczny i niezrozumiały błąd techniczny w konstrukcji, który na szczęście łatwo jest naprawić, jednak duże zaskoczenie i niesmak pozostaje.
Za drugi minus uważam akcesoria – dokładnie – te same akcesoria które na początku recenzji wychwalałem. Owszem, jest ich sporo, i są naprawdę rewelacyjne, ale jednak mamy tu do czynienia z jarmarkiem! Jeden misiek jako nagroda w rzutkach? Kiełbaska i udko oraz dwa kubki na stoisku z grillem? Seria Winter Village zawsze słynęła z przepychu, paradoksalnie w przypadku jarmarku, w którym to ten przepych powinien być jeszcze mocniej widoczny, czegoś po prostu zabrakło!
Odnoszę też wrażenie, że zestaw był projektowany „na szybko” – stąd właśnie błąd techniczny, relatywnie mało akcesoriów (brak czasu na kombinowanie, co dołożyć i kosztem czego) oraz wpadki w postaci np.: dziwacznych i mało ciekawych dwóch „pojazdów” na karuzeli.
Na szczęście dziewięć świetnych figurek pozwala nieco zniwelować bolączki zestawu, a nastój świąteczny wprost od niego bije. Tegoroczny zestaw w moim prywatnym rankingu nie pobił może sklepu z zabawkami czy piekarni, ale (przymykając oko na błedy) sprawdził się nad wyraz dobrze.
Po budowie zostaje sporo elementów zapasowych w tym… dodatkowa broda! Oj, naprawdę, jakiś świąteczny troll tu chyba mieszał z elementami…

























































{kind=link}
{kind=link}