Pałacyk ze Świerklańca
Czy wiesz, że jeden z najbardziej okazałych pałaców wybudowanych na terenach Śląska, powstał z miłości do córki ubogiego krawca?

Trochę historycznego wstępu (dla ciekawych):
Kobieta ta nazywała się wtedy Markiza Blanche de Paiva, lecz jej pierwotne nazwisko brzmiało Therese Pauline Blanche Lachmann. Urodziła się w 1819 roku, najprawdopodobniej w Nysie lub Moskwie. Mimo wczesnego ślubu z równie ubogim krawcem, ciągnęło ją do przepychu, co poskutkowało wyjazdem z Moskwy, w której spędziła dzieciństwo, do rozkwitającego za czasów Napoleona – Paryża. Tam, dzięki swojej podobno ponadprzeciętnej inteligencji, oraz dowcipowi, a także intrygom, który sama knuła, została jedną z najbardziej znanych kurtyzan. W tym czasie zainwestowała zdobyte pieniądze we własną rezydencję, która w bardzo krótkim czasie stała się miejscem spotkań paryskiej elity. Spotykała się z wieloma mężczyznami. Osobą, z którą związała się kolejnym węzłem małżeńskim, był m. in. portugalski arystokrata Albino-Francesco de Paiva Araujo, po którym przyjęła tytuł markizy Blanche de Paiva. Jednak największą miłość spotkała jeszcze później. Był nią o 10 lat młodszy hrabia Guido Henckel von Donnersmarck – jeden z najbogatszych ludzi ówczesnej Europy.
Podstawą jego fortuny był przemysł. Jego własnością była m.in. huta „Donnersmarck” i kopalnia „Guido” w Zabrzu, huta „Bethlen-Falva” i kopalnia „Deutschland” w Świętochłowicach, kopalnia „Śląsk” w Chropaczowie, huta cynku „Guidotto” i kopalnia „Donnersmarck” w Chwałowicach, kopalnia „Karsten-Centrum” w Bytomiu i kopalnia „Andaluzja” w Piekarach. Był założycielem pierwszej na Dolnym i Górnym Śląsku spółki akcyjnej „Śląskie Kopalnie i Cynkownie” z siedzibą w Lipinach. W okolicach Kalet wybudował celulozownię, potem papiernię, które połączył z podobnym przedsiębiorstwem w Dąbiu koło Szczecina. Tam posiadał hutę żelaza „Kraft”. Inwestował w zagłębiu Ruhry, we Francji, na Sardynii, w Karyntii, na Morawach i w Królestwie Polskim. Hrabia był dobrym przyjacielem Bismarcka. Zajmował się również polityką, był m. in. autorem podwyższenia francuskiej kontrybucji, za co Francuzi na pewno go nie polubili.
Po związaniu się Markizą de Paiva początkowo mieszkali głównie we Francji, lecz około 1870 roku Hrabia wywiózł ukochaną do swoich posiadłości w Świerklańcu, ponieważ Francuzi oskarżyli ją o szpiegostwo i zagrozili śmiercią.
Podczas pobytu we Francji, hrabia sprezentował markizie pałac w Pontchartrain znajdujący się w północnej części Francji, niedaleko Paryża.
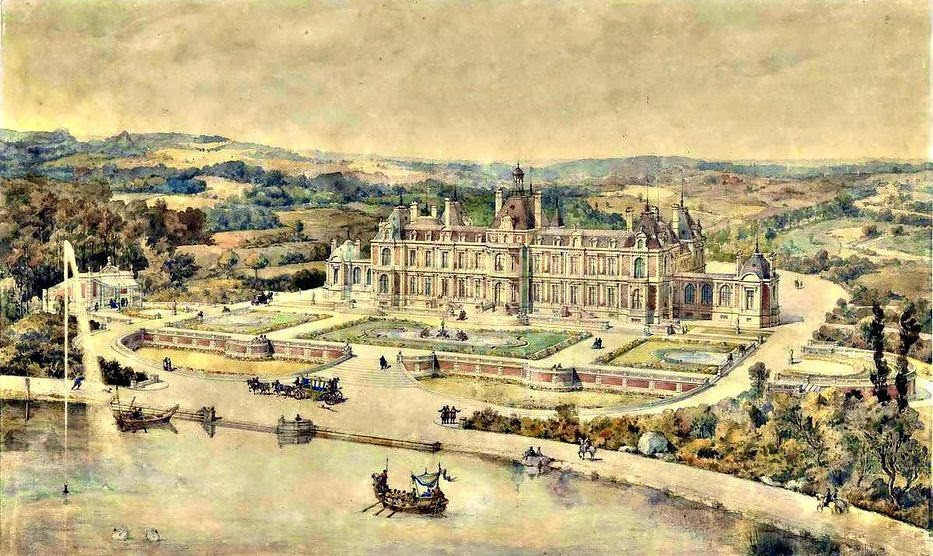
Po przeprowadzce do Świerklańca małżonkowie zamieszkali w stojącym tu od średniowiecza starym kamiennym zamku. Markiza, przyzwyczajona do salonów ówczesnego Paryża, męczyła się jednak w nim. W związku z tym zakochany Hrabia, początkowo myślał o przeniesieniu pałacu z Francji do Świerklańca, ostatecznie jednak kazał zaprojektować nowy pałac na wzór francuskich. Jako głównego architekta zatrudnił Hectora Lefuel, nadwornego architekta Napoleona, znanego przede wszystkim z zaprojektowania Paryskiego Luwru.
Projekt nawiązywał do pałacu w Pontchartrain, ale również do paryskiego Wersalu. W pałacu umieszczono 34 komnaty o bardzo dużej powierzchni oraz 6 luksusowych apartamentów. Wszystko wyposażone było w nowoczesne i ekskluzywne łazienki, systemy ogrzewania i wentylacji.
Specjalnie dla cesarza Wilhelma II, który był częstym gościem u Donnersmarcków, kilkadziesiąt metrów dalej usytuowano budynek zwany dziś Pałacem Kawalera. W odróżnieniu od „Małego Wersalu” dotrwał on do naszych czasów. W chwili obecnej znajduje się w nim hotel.
Blanka de Paiva uwielbiała kolekcjonować sztukę, w związku z czym we wnętrzach pałacu oraz w jego okolicach, można było znaleźć ogromną kolekcję różnych dzieł ówczesnych artystów. Do dzisiaj można podziwiać sporo ocalałych rzeźb na terenie okolicznego parku, część z nich jest autorstwa innego słynnego wtedy artysty – Emanuela Fremiet.
Pałac przetrwał nawałnice obydwu wojen światowych. Pierwsze nieszczęście dopadło go dopiero podczas wyzwalania przez wojska radzieckie. W 1945 roku żołnierze Armii Czerwonej podobno urządzili sobie w nim ognisko i część pałacu spłonęła. Spalone ruiny stały i niszczały ponad 16 lat. W 1957 roku ruiny zostały wpisane do rejestru zabytków. W dniu 20 grudnia 1961 roku Ministerstwo Kultury i Sztuki wydało decyzję nakazującą odbudowę zamku. Jednakże w roku 1962 na polecenie Prezydium Powiatowej Rady Narodowej w Tarnowskich Górach ruiny zamku zostały wysadzone, a następnie całkowicie rozebrane przez okoliczną ludność w zamian za możliwość wykorzystania gruzów pałacu we własnych domostwach.
Jednym z ocalałych elementów pałacu jest brama. Została przeniesiona w całości do Parku Śląskiego i do dzisiejszego dnia można ją oglądać przy wejściu do Chorzowskiego Zoo.
————————————————————————-
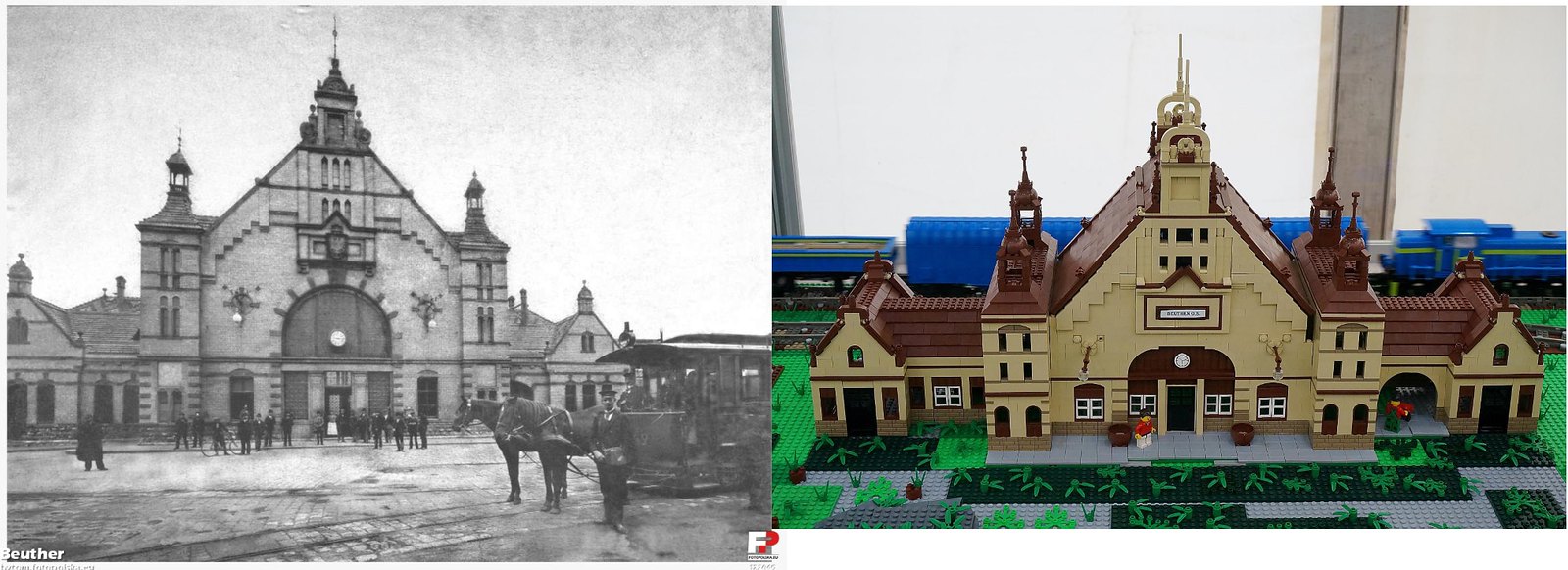
Tyle wstępu historycznego. Już dwa lata temu przyszedł mi do głowy pomysł zbudowania z klocków replik pałacyków śląskich, zwłaszcza takich których już nie ma, lub zostały z nich tylko ruiny. Początkowo pierwszą taką repliką miał być inny pałacyk, ale ostatecznie rozpocząłem od najsłynniejszego śląskiego pałacyku, zwanego potocznie „Małym Wersalem”.
Budowanie zajęło mi 5 miesięcy. Zacząłem od szukania wszelkich informacji o pałacyku. Wiedziałem wcześniej, że nie ma dostępnych żadnych planów pałacu, z czasów jego budowy została tylko akwarela autorstwa architekta – Hectora Lefuel.
Jednym z pierwszych problemów na jakie natrafiłem było ustalenie … kolorystyki. Większość dostępnych zdjęć jest czarno biała, a obrazki uwieczniające pałac bywają dość fantazyjne nawet w kolorystyce. Na szczęście w którejś książce znalazłem opis „pałac charakteryzował się czerwonymi ścianami z białymi zdobieniami”.
W międzyczasie nawiązałem kontakt z Panią Karoliną Koszutą, która zwizualizowała pałacyk rok wcześniej.
Wybranie skali było w miarę oczywiste – zostało właściwie zdeterminowane wielkością dostępnych legowych okienek 🙂 Przy czym – model NIE JEST w skali minifig! Gdyby miał zachować skalę legowych figurek, to musiałby być jeszcze 1.5 razy większy, mimo tego, że zbudowany zajmuje 9×4 płyty bazowe! Jego wielkość i tak pod koniec mocno dała mi (i całej rodzinie) się we znaki. Trzymanie przez dłuższy czas w pokoju kolosa o wielkości 2.5×1.5 metra jest jednak trochę niewygodne 🙂

Z ciekawostek:
– na pałacyk poszło, około 1000 okienek, ponad 1000 plate 1×1 białych, tyle samo czerwonych, a także ponad tysiąc jumperów (tu na szczęście większości nie widać, więc kolor był mniej istotny). Ile poszło całkowicie klocków? Nie mam pojęcia, i nie zamierzam liczyć …
– wykupywałem wszystkie slope i double-slope 2x2x3 czarne jakie znalazłem w pobliżu (czyli również w Czechach i Niemczech)
– całe ściany w centralnej części są zbudowane SNOTem (w bok)

W kilku miejscach skłamałem:
– fontanna z 3 nimfami była z drugiej strony pałacyku, ale plac był bardzo pusty, więc ją przeniosłem

– boczne kawałki skrzydeł (te niskie) powinny być trochę dłuższe, ale oznaczałoby to wydłużenie pałacu o kolejne dwie płyty bazowe (a i tak niewiele osób pewnie zauważy co usunąłem z nich)

– zignorowałem kominy, bo to wymagałoby dodatkowych wzmocnień dachów
– na samym dole też powinno być wszystko białe, ale na wszystkich zdjęciach widać tam ciemniejszy kolor, więc tak zostawiłem. W rzeczywistości ten ciemniejszy kolor to był po prostu brud a nie farba 🙂
– w kilku miejscach malowałem klocki 🙂 Przede wszystkim w bramie, w której zresztą pomalowany piesek „robi za lwa” 🙂

Wiecej zdjęć można zobaczyć na Flickrze
Dziękuję Boogiemu i Darkowi Mrozowi za zdjęcia z których skorzystałem 🙂
Dziękuję Darkowi i Longerowi za to, że w nocy (przed otwarciem wystawy w Chorzowie) pomagali mi dokończyć rozwalony podczas transportu dach, oraz uzupełniać zieleniznę. A Sikorce za pomoc w poprawianiu wszystkiego przed wystawą w Swarzewie.
Dziękuję też Krisowi, za to, że jednak przynajmniej jedna rzecz mu się spodobała (czyli zdobienia w środkowej części pałacyku) 🙂

Ilość błędów i niedoróbek i tak jest w pałacyku ogromna (co mnie wkurza – przed Swarzewem nie udało się dalej wyłapać i poprawić wszystkich), ale jakoś mam nadzieję ten model przypomina oryginalną budowlę. 🙂